End to End driving (2018)
- Used Unity simulator to collect the good driving data.
- Using input images from the three camera and corresponding steering angle trained a feed forward Convolution neural network.
- Used the trained model to drive on different tracks in Unity simulator.
- Project Utilized: PyTorch, Python, Unity Simulator.
Code: https://github.com/amita-kapoor/Behavioural-Cloning-SDC
Navigation (2018)
- Trained a Unity ML agent to navigate through the state space to collect Yellow bananas
- Trained three layered feed forward Deep Q Network.
- Used Replay Buffer and soft update.
- Project Utilized: PyTorch, Python, UnityML
Facial Keypoint Detection and Real-time Filtering (2017)
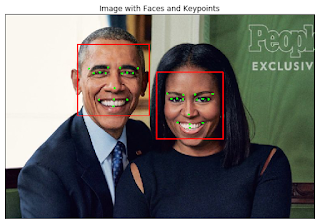
- Created and trained a CNN network to detect 15 facial keypoints.
- The project takes in an input image/video and can detect the keypoints.
- Project Utilized: Python, Keras, TensorFlow, OpenCV
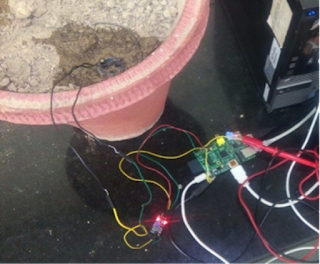
Development of Garden-bot:
An automatic irrigation system sensing soil moisture content using self made sensor for efficient use of resources and optimum flow of water in the fields (2016).
- Developed an automated irrigation system developed to take care of your plants in your absence.
- Uses self-made low-cost capacitive sensors for the detection of water level in plants.
- Sensors are interfaced with Raspberry Pi microcontroller board.
- Algorithm was developed to detect the threshold moisture levels and control the water inflow for efficient use of water.
- Java-based app interface is also developed to allow manual control and inspection of the moisture content.